For my final project I wanted to move away from the world of Arduino and explore building synthesisers using integrated circuits. I’d had quite a bit of experience with microcontrollers before this course, so decided to challenge myself with something more foreign to me: stepping back from the code and focusing on the electronics (definitely where I struggle the most).



If you don’t feel like reading, here is a video detailing some of the work I completed over the last few weeks, testing out different circuits and components:
Step 1: Initial concept (23.02.16)
My initial idea is to build a noisy drone synthesiser, focusing on microtonal adjustments as opposed to the western 12-tone scale. In particular I’m taking inspiration from Casper Electronics’ Drone Lab and Nova Drone. Here are some videos of the instruments in action:
I want the synth to have three “banks”, each with its own set of controls. The banks would be divided into low, middle, and high frequencies. Each bank would have two oscillators, potentially made from a 556 timer chip, and could have the following controls:
- Volume
- General Pitch
- Fine-tune pitch
- Detuning oscillators
- Based on the amount of time I have, each bank may also have a controllable low frequency oscillator which would affect the volume. In this case, the volume control would determine the upper volume limit.
Currently I plan to use potentiometers to control these parameters in order to make microtonal/gradual adjustments. However, I am open to employing more uncommon components if they will enable to me explore different methods of control without feeling too gimmicky. In this project I am placing more importance on function over novelty, as it is something I would like to use in future performances. If I include LFOs on each bank, they could also have an on/off toggle.
I would also like to explore simple analog video synthesis, if time permits. I would aim for something dreamlike, or attempting to convey the visual equivalent of drones – whatever that might be.
In a perfect world, my inputs would therefore be:
- Three banks of potentiometers
- On/off toggle
- A toggle switch for each bank
- Potentially alternate components for parameter control (pressure, capacitive touch etc)
And my outputs would be:
- Mono audio
- Composite or VGA video
The enclosure must be robust and portable enough for me to take the instrument around to different performance venues. Therefore I will probably use aluminium enclosures, like those used for guitar effects pedals. I would prefer it to have a compact form factor so as not to be obtrusive or take up too much space on whatever surface I am using it on, whether that be during a performance or home recording.
Step 2: Designing schematic
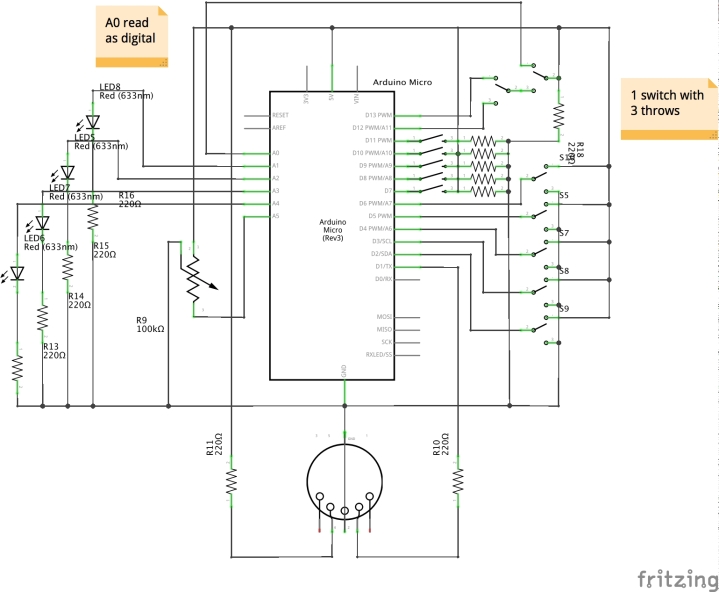
I decided to draw a kind of “pseudo-schematic”, equivalent to pseudo-code that programmers write to describe a program or algorithm at a higher, more comprehensible level. I’ve focused on how I would control three banks, with two oscillators each, both being controlled by the same potentiometers.

In this sketch, each oscillator pair has a volume and pitch potentiometer. Then, one oscillator in each pair is connected to another potentiometer in to further change its pitch, resulting in detune functionality.
Step 3: Sourcing components
After much deliberation, I have ordered a range of potentiometers to test out: a range of stereo potentiometers, both linear and logarithmic, of various resistances, and some 10k and 1k linear potentiometers. I intend to use the 1k pots as the detune, as they should give me finer control.
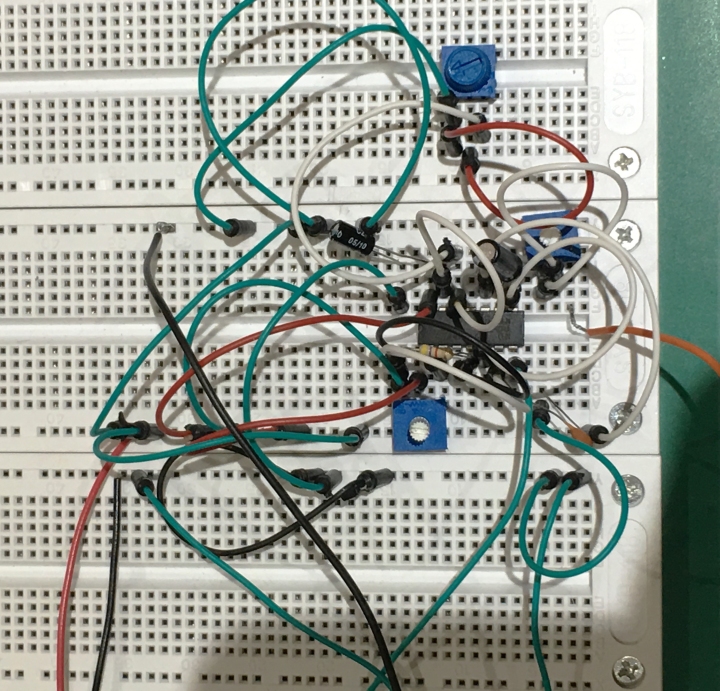
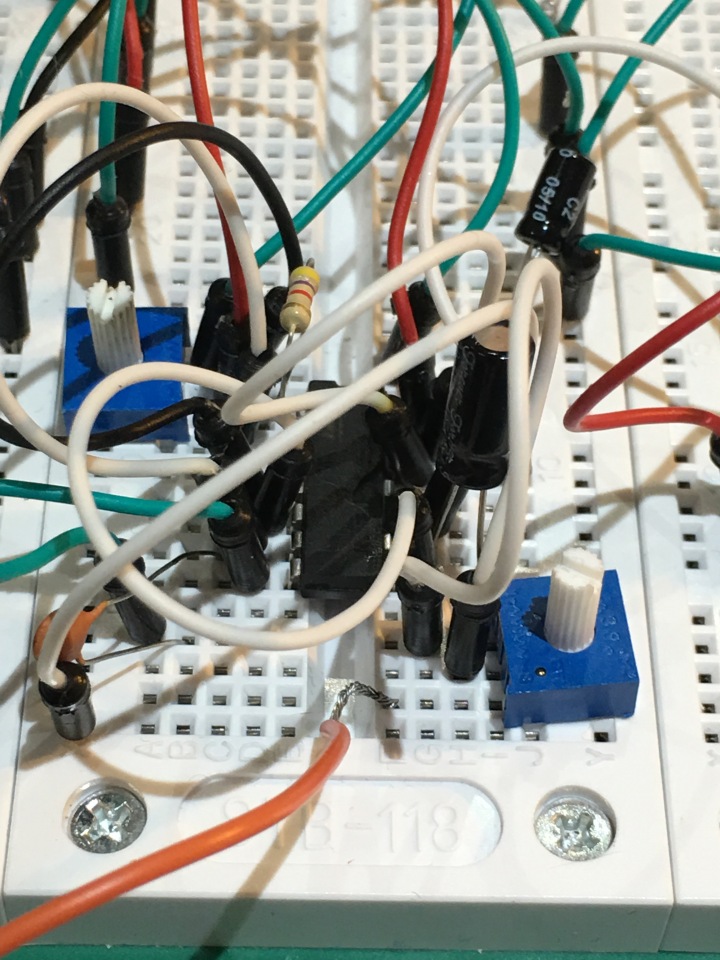
Step 4: Breadboard prototyping (07-19.03.16)
Over the last few weeks I have been testing different components and circuits. I have found that the potentiometers did not behave as expected, in several instances. For example, the 1k potentiometers did not give me the finer control I was looking for – instead they gave me only a very slightly smaller pitch range.
However I did find some interesting effects with the stereo potentiometers. Though they also did not behave as I had expected, I did manage to achieve a crossfading effect between oscillators, which could be an interesting route to follow in the future.
Furthermore, I experimented with diodes to create a ring modulation effect. Though this wasn’t the sound I was looking for, it was a lot of fun! During this point of the project I also experimented with light dependent resistors to control the pitch. It was also a fun to play with, but rather gimmicky and hard to control – not great for real-world use.
The main issue I found here, along with the potentiometers, was the different pitches of the oscillators. I tested a few chips, and on one side the pins resulted in an oscillator of a much higher (and annoying) pitch.
At this I decided to refine the idea down to its core – the emerging complexity from the interaction of two simple oscillators.
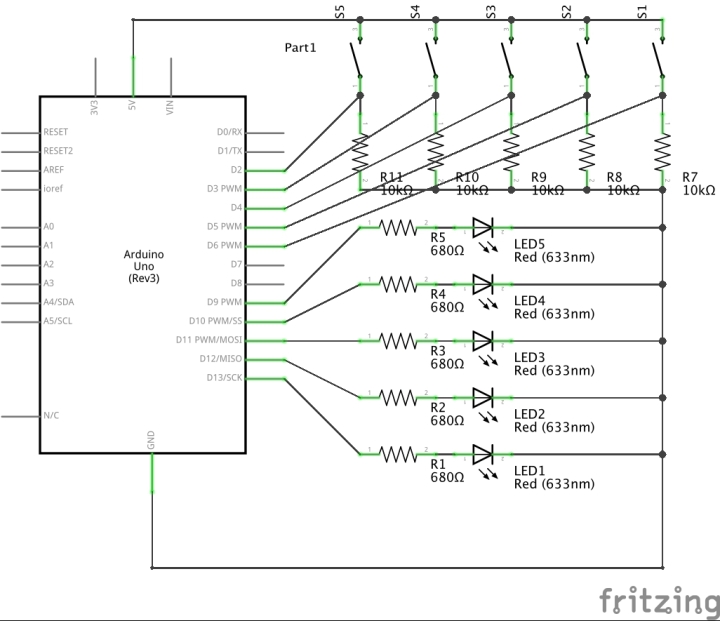
Step 5: Refining schematic (19.03.16)

This is the updated schematic of my project, showing the simplified circuit that emphasises the interaction I’m looking for. I want to make this an ultra-portable pocket synth that can be used as sound source in performances and recordings. It could also be a prototype for a very simple oscillator Eurorack module.
Step 6: Building
I chose to use 10k potentiometers coupled with 22uF capacitors, since they gave me the widest useable control from rhythmic pulses to pure tones. To go with my idea of a small form factor, I used an Altoids mint tin as the enclosure – joining a long-running community of Altoid tin projects. The main challenge I found was fitting everything inside of the tin; I could have easily switched to a bigger enclosure, which would have given me much more room to play about, but I wanted to stick to ultra-portability. Because of the shallowness of the tin, I had to switch to using a mini-jack input, but eventually, I managed to get everything in with room to spare!
Step 7: Reflection + Future Development
In reflection I am pleased with the final outcome, as I have achieved my goal of creating an interesting sound source that uses interacting waveforms to generate complexity, in a very small form factor. It is definitely something that I could go out and use tomorrow as part of a performance.
However, I believe there is definite room for more functionality. First, I would implement the power toggle I had tested, as well as an indicator LED. Then, I would like to build out the full drone machine detailed above – basically three of these pocket synths combined together, with some different potentiometers.
I would also like to experiment with different chips, like the CMOS 4070 that creates more non-harmonic sounds, which could be interesting to play about with.
Thanks for reading!